Le bord d'aile de KSP
- Choix du site de
minage
(mods utilisés :
KER,
MechJeb)
- conception
- atterrissage et scan
- fichier
*.craft du rover seul
- fichier
*.craft de l'ensemble
(clic droit - Enregistrer sous,
puis déposer dans VotreDossierKSP\saves\NomDeVotreSauvegarde\Ships\VAB)
Maintenant que nous avons une vague idée de la localisation du minerai suite à notre scan orbital, il va falloir aller se poser pour affiner tout ça. Pour cela, nous aurons besoin des deux autres scanners de minerai à dispo, et pour les utiliser, nous allons construire un petit rover.
- Conception
Retour en
haut de page
Pour un rover, nous allons plutôt passer par le SPH (Space Plane Hangar) que le VAB, qui est plus adapté pour les trucs horizontaux. Comme il n'y a pas besoin de beaucoup de matériel, le rover est plutôt simpliste :
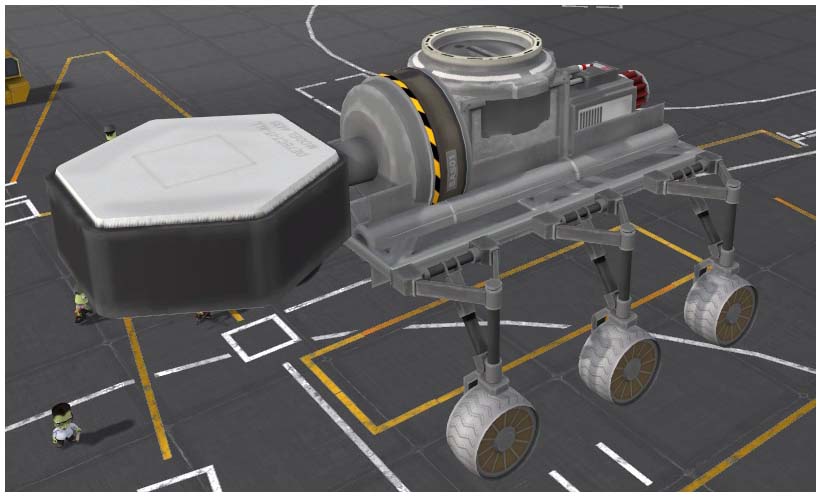
La pièce maîtresse est ici le cube de contrôle Probodobodyne QBE, qui nous servira surtout avoir la navball orientée dans le bon sens. Sur le dessus de celui-ci, un Docking Port Jr qui nous permettra d'accrocher notre rover à son vaisseau de transport, et sur le devant, une petite roue de réaction pour la stabilité, mais avec une petite particularité :

Elle est ici en mode SAS Only, afin de ne servir qu'au maintien de cap et d'éviter de faire basculer le rover en avant lorsque l'on accélère ou de le renverser sur le côté quand on tourne. Sur la roue de réaction on trouve le M4435 Narrow-Band Scanner qui sera notre outil principal pour définir la localisation. Sous ce cube j'ai placé deux plaques de tôle qui servent de châssis au rover et permettent d'attacher les autres pièces.
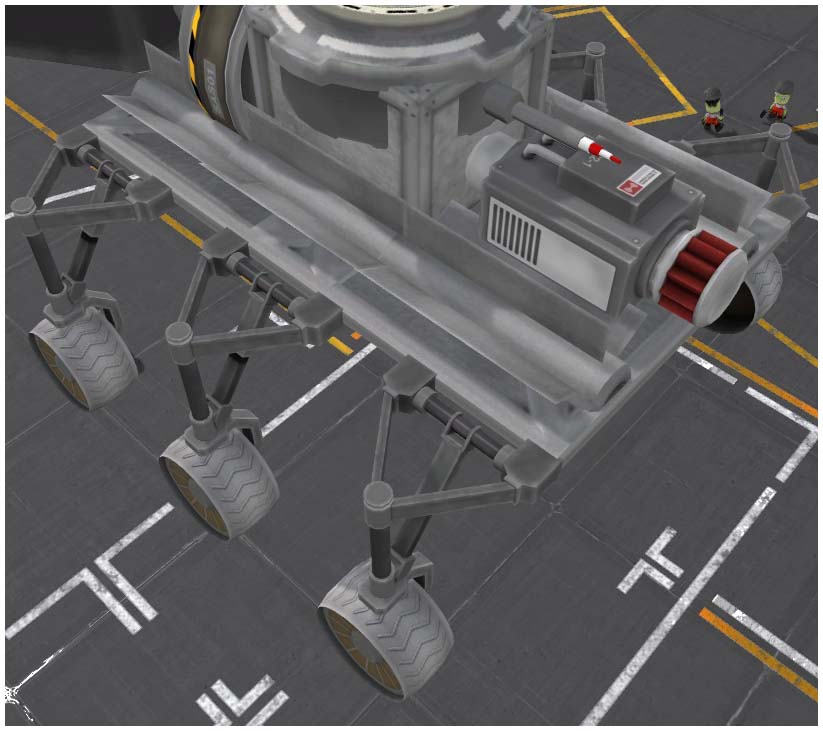
A l'arrière, le Surface Scanning Module nous permettra d'affiner les données orbitale et permettre au Narrow-Band Scanner de fonctionner au mieux. Une petite antenne complète le tout, afin de transmettre les quelques points de science récoltés.
Pour la propulsion et la stabilité, 6 roues, et pour les alimenter, des PB-NUK Radioisotope Thermoelectric Generators (RTG en plus court ^^ ) Ces derniers produisent de l'électricité à partir de... rien en fait. Inconvénient, ils produisent très peu de jus et coûtent un bras, mais pour notre rover, cela suffira.
Afin d'envoyer tout cela sur Minmus il nous faut un module de transport. Là aussi on fera simple, juste une sonde (pas besoin d'envoyer un pod habité pour ça), on accroche le rover dessous (et pour qu'il ne dépasse pas trop on est obligé de passer au format 2.50m), des pieds d'atterrissage assez haut pour que le rover ne coince pas, un peu de fuel, et des réacteurs latéraux (puisqu'on ne peut pas les mettre dessous ^^ ) :

Le professeur Werner Von Kerman est en train de faire une dernière vérification sur les pieds d'atterrissage ^^
Puis pour lancer ça en orbite, un lanceur somme toute classique (mono-étage), avec juste une petite particularité :

Le rover est posé à l'envers au sommet de la fusée ^^ (forcément, vu qu'on ne peut rien accrocher dessous) De fait il faut rajouter une deuxième sonde sur le lanceur sinon on se retrouve avec la navball à l'envers, c'est un peu gênant pour décoller :op (c'est possible ceci dit, 'faut juste inverser toutes les directions, je préfère ne pas m'embêter :op ). Une fois circularisé en orbite il faudra juste penser à sauter sur "l'autre vaisseau" (touche ^ par défaut) pour rester aux commandes du rover et pas de notre étage de lancement
- Atterrissage et
scan
("aminmussage"
? :op )
Retour en
haut de page
L'interception et la mise en orbite de Minmus se passe comme précédemment, je ne reviens pas dessus ;o) Pour choisir l'altitude la plus basse en vue de notre atterrissage, malheureusement le Wiki n'indique pas les hauteurs du relief comme pour la Mûn, mais d'après les recherches que j'ai pu faire le plus haut sommet est à 5 724m, on pourra donc orbiter à 6 km.
Ouais, ça fait proche ^^
Le soucis maintenant c'est qu'on ne peut voir l'affichage des zones scannées qu'à partir du satellite qui a le scanner (ou depuis la Tracking Station), et pas depuis notre vaisseau actuel. Je pense qu'il s'agit d'un bug et il faut espérer qu'il soit corrigé un jour, mais en attendant, on va utiliser MechJeb pour palier à ça.
Repassons donc sur notre satellite de scan et affichons à nouveau ces fameuses zones :
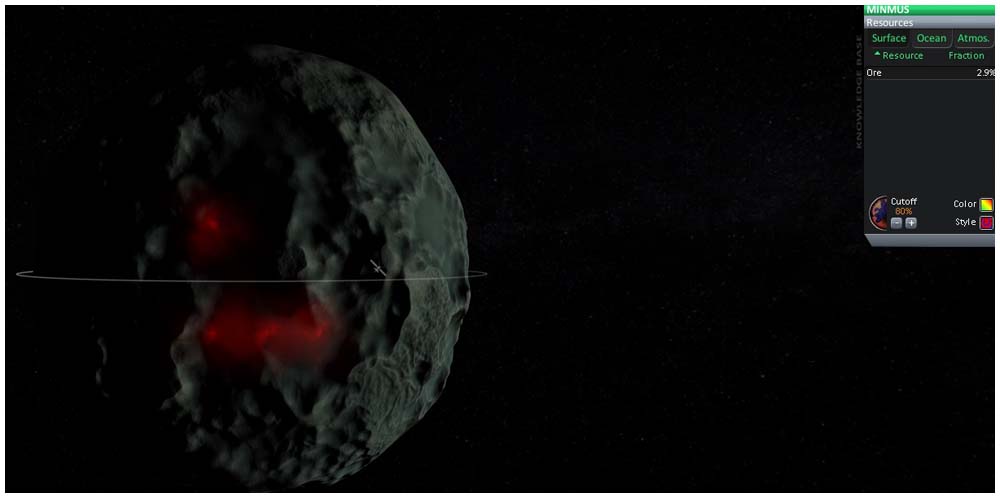
Ouvrons ensuite le module "Landing Guidance" de MechJeb et cliquons sur le bouton "Pick target on map" ("choisir la cible sur la carte"). Apparait un curseur jaune, on le déplace là où on veut se poser :
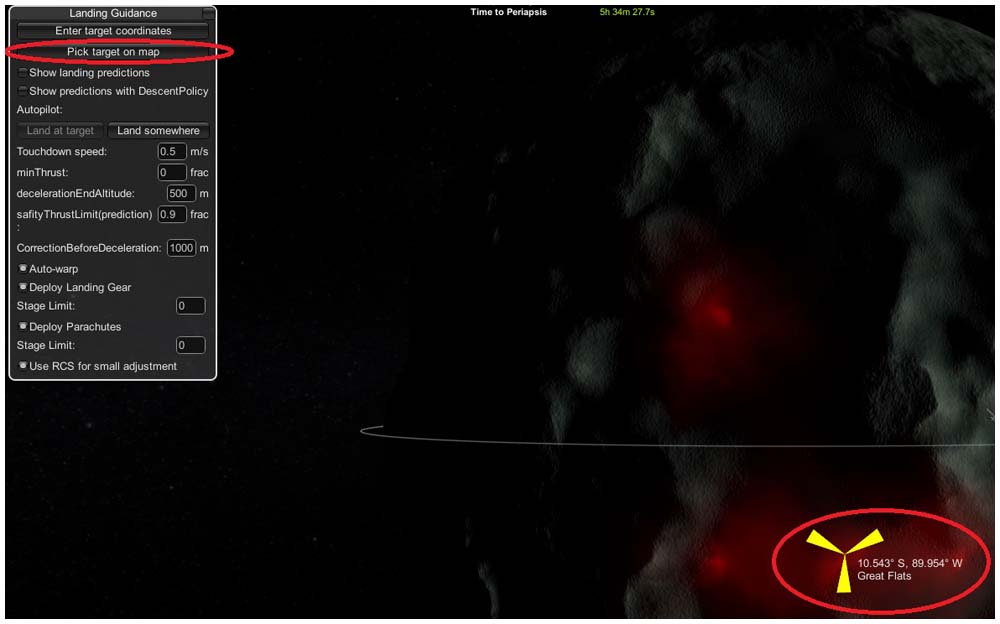
Pas besoin d'une grande précision, on est là justement pour trouver la zone la plus riche. Une fois que l'on a choisi notre site d'atterrissage, le curseur passe en rouge et la fenêtre indique la latitude et la longitude de ce point :
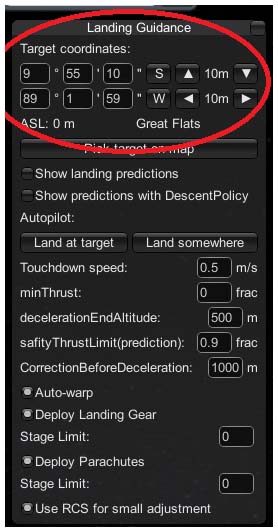
9°55'10" S (nous sommes dans l'hémisphère sud) et 89°1'59" W. Nous
apprenons en outre que le biome concerné est la zone des "Great Flats"
(les "Grands Plats") et que l'altitude du sol est de 0m (le "niveau de
la mer" de Minmus). Ca tombe bien, du coup nous n'aurons pas à
surveiller l'altitude du terrain sur KER puisqu'elle sera la même que
celle du compteur ;o) Les boutons sur le côté permettent de modifier
l'emplacement du point de chute par cran de 10m.
Notez vos coordonnées quelque part, normalement elles
restent enregistrées quand nous changeons de vaisseau, mais on ne sait
jamais (si on charge une sauvegarde ou quitte le jeu par exemple, je ne
suis pas sûr qu'elles restent). Nous les reporterons lorsque nous serons
revenus sur notre rover.
Il ne reste plus qu'à poser notre nœud pour viser le point rouge :
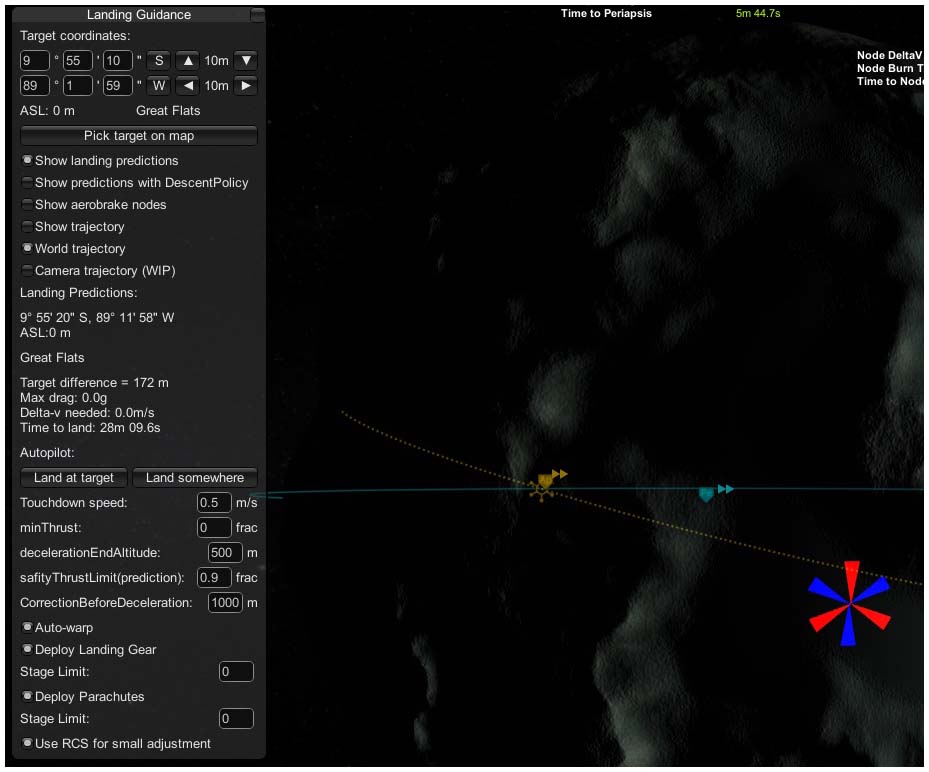
En bonus en cochant la case "Show landing predictions" ("Montrer les prédictions d'atterrissage") vous disposez d'un point bleu qui indique votre point de chute avec les paramètres actuels. Il ne reste plus qu'à faire coïncider les deux (normalement on devrait viser un poil plus loin vu que l'on va rapprocher ce point en ralentissant notre vaisseau, mais là on n'est pas à ça près). Vous avez en dessous la différence entre votre chute et la cible, si vous voulez vraiment être précis.
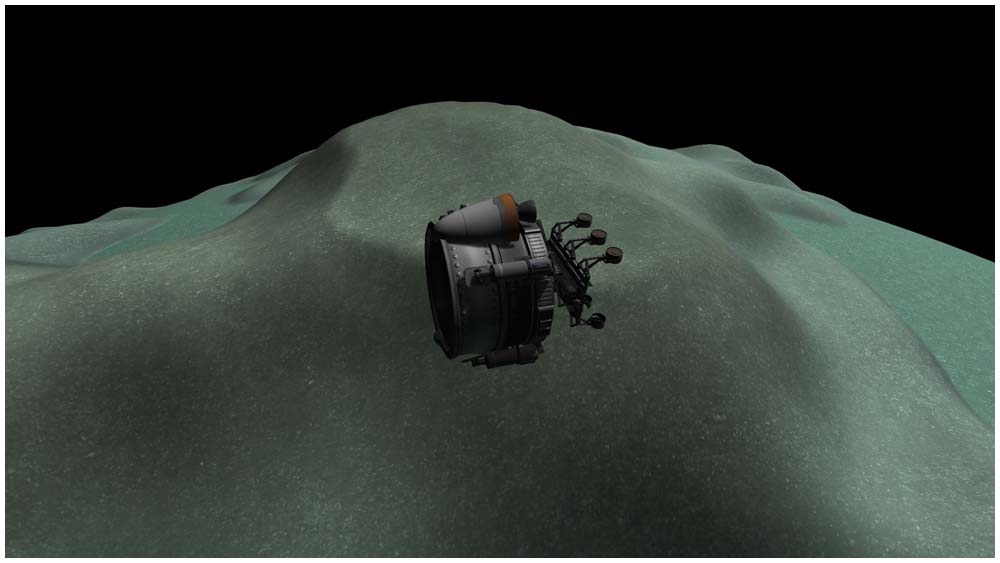
Y'a plus qu'à se poser :o)
C'est teeeeeellement plus facile que sur la Mûn :op
Une fois au sol, on peut dé-docker le rover et abandonner le module de transport.
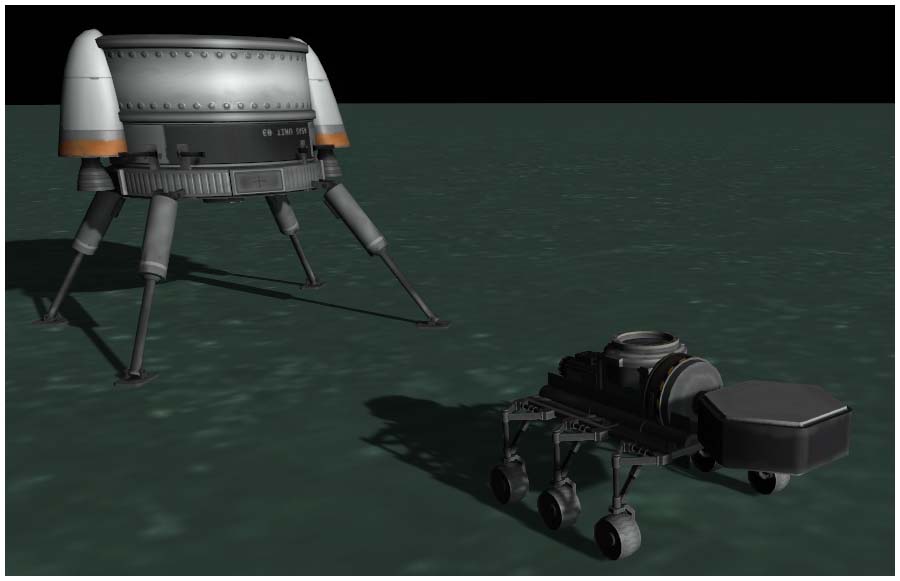
Repassez le contrôle du rover sur le cube de commande (il est par défaut sur le dock, donc "vers le haut"), enclenchez le SAS pour la stabilité, et roule ma poule :o) J'aime bien mon petit rover, il me rappelle Bleuet, le chien robotique de la série des années 90 "FX, effets spéciaux" :op
Bon, c'est pas tout ça, mais il est temps de bosser maintenant. Première chose à faire, effectuez un scan avec le Surface Scanning Module (clic droit, bouton "Run Analysis") situé à l'arrière du rover, puis activez le Narrow-Band (le gros truc à l'avant) cliquez sur le bouton "Toggle Scanner GUI", ce qui nous affiche une nouvelle fenêtre :

Ici aussi on peut changer les couleurs avec le bouton kivabien, comme
pour le scanner orbital (j'aime bien celui en nuances de vert à rouge,
je le trouve plus pratique). Ce scanner nous apprend que nous sommes au
point -9.620 S / -90.479 W (il n'affiche pas les latitudes et longitudes
de la même manière que Mechjeb qui le fait en degrés / minutes /
secondes, mais en décimal), et que la concentration actuelle de minerai
dans le sol est de 6.307%.
En baladant le curseur sur la carte on peut voir les
zones les plus riches (les plus rouges quoi). Si nous n'avions pas
effectué le scanner de surface, le pourcentage de richesse serait le
même partout (le niveau moyen) donc il faut y penser.
Il ne reste plus qu'à diriger notre petit rover vers le spot contenant le plus de minerai :o) Ici, ce serait vers le coin nord-ouest (mais pas possible de le prendre en screenshot, le curseur ne s'affiche pas ^^ ), donc on se tourne au cap 315° et on part en balade. N'accélérez pas trop fort, malgré le SAS le rover risque de lever l'avant ^^ Par palier de 0.5 / 1 m/s ça marche pas mal, jusqu'à une vitesse max d'environ 10 m/s.
Cliquez sur le bouton Refresh de temps en temps, il me semble que la carte ne se recentre pas à jour toute seule. Comme ça peut être long, vous pouvez forcer l'accélération temporelle physique (x4 maxi) en appuyant sur Alt-. et Alt-, (par défaut), histoire d'aller un peu plus vite, mais dans ce cas attention si vous changez de direction, tout est amplifié :op Arrêtez-vous régulièrement également pour être sûr que la carte ne perd pas le nord, ce serait dommage pour une carte ^^
A 10 km de mon module de transport, j'ai trouvé un spot intéressant :
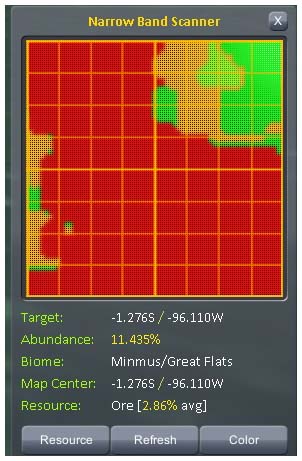
11.435% de concentration, c'est le max que j'ai à la ronde, ça devrait être pas mal. Y'a plus qu'à abandonner le rover ici pour servir de point de repère pour l'atterrissage de notre futur module de minage :o)
Reste plus qu'à forer :o)